

I nostri motori elettrici trifase e motori elettrici sono idonei per le più svariate applicazioni ed impieghi con prestazioni eccezionali. I prodotti Chtmotor.com sono conformi alle Direttive di prodotto applicabili come richiesto in tutti i paesi della Comunità Europea, per garantire un opportuno standard di sicurezza.
Gamma prodotti
Motori elettrici igienici IP69K in acciaio/alluminio
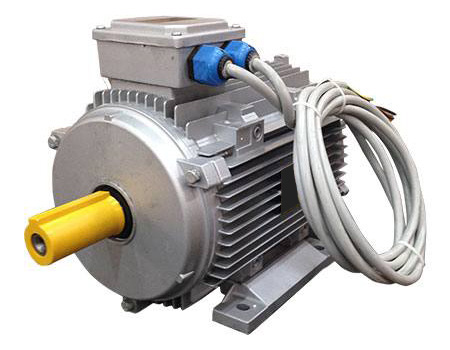
Motori elettrici trifase – IE4 IE3 IE2 IE1
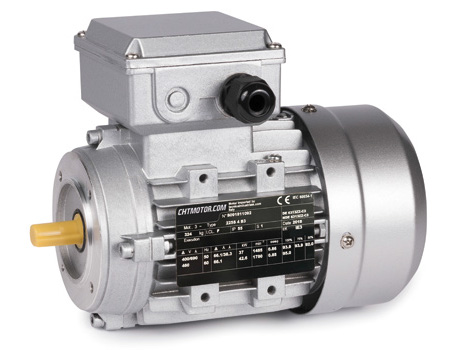
Motori elettrici monofase
Motori elettrici autofrenanti
Motori elettrici compatti
Esecuzioni motori fuori standard

CERTIFICAZIONI QUALITÀ
I prodotti Chtmotor.com sono conformi alle Direttive di prodotto applicabili come richiesto in tutti i paesi della Comunità Europea, per garantire un opportuno standard di sicurezza.
ESECUZIONI SU MISURA
Impregnazione supplementare avvolgimento, protezione da IP56 a IP67, motore senza ventola per ventilatore, cuscinetto isolato elettricamente, verniciature speciali etc.
SUPPORTO TECNICO
Un team di professionisti al vostro servizio, con competenze stabilite e stimolato dal continuo aggiornamento, è a vostra disposizione per offrire suggerimenti qualificati per i prodotti più adatti.
Motori elettrici standard – motori elettrici trifase
Il gruppo di motori trifase include macchine elettriche il cui funzionamento è basato su un campo magnetico rotante posto nel traferro compreso tra lo statore e il rotore. La macchina più importante e comunemente utilizzata di questo gruppo è il motore trifase asincrono a induzione, nella configurazione a gabbia di scoiattolo, caratterizzato da:
design semplice e robusto
affidabilità operativa elevata
funzionamento a bassa manutenzione
basso prezzo
Nella tecnica di azionamento elettrico in genere vengono utilizzati i seguenti motori elettrici:
motori trifase asincroni (rotori a gabbia di scoiattolo, rotori ad anelli, motori di coppia)
motori asincroni monofase a corrente alternata
servomotori asincroni o sincroni
motori a corrente continua
Poiché i motori dotati di convertitori di frequenza garantiscono un controllo della velocità migliore e più semplice e richiedono una manutenzione meno frequente, i motori ad anelli a corrente continua o alternata sono sempre meno usati. Altri tipi di motori trifase asincroni hanno un’importanza marginale nella tecnica di azionamento e, pertanto, non saranno descritti in dettaglio in questa sede.
Se si combina un motore elettrico, per es. un motore trifase, con un riduttore, si ottiene un cosiddetto motoriduttore . Indipendentemente dal principio elettrico, il modo in cui il motore è montato su un riduttore è di particolare importanza in termini di costruzione meccanica del motore stesso.
Come funziona un motore elettrico trifase?
Struttura
Rotore
Lungo le scanalature del pacco laminato del rotore si trova una bobina, iniettata o inserita (per es. di alluminio e/o rame), cortocircuitata a entrambe le estremità per mezzo di anelli dello stesso materiale. Le barre con gli anelli di corto circuito ricordano una gabbia e da qui deriva il secondo termine comunemente usato per indicare i motori trifase, ovvero “motori a gabbia di scoiattolo”.
Statore
La bobina, circondata da resina sintetica, è inserita nella scanalatura chiusa per metà del pacco laminato dello statore. Il numero e l’ampiezza delle spire varia, così da ottenere numeri di poli diversi (velocità). Insieme all’alloggiamento del motore, il pacco laminato forma lo statore.
Scudi
Gli scudi sono realizzati in acciaio, ghisa grigia o ghisa di alluminio e sigillano l’interno del motore, rispettivamente sul lato A e B. L’esecuzione costruttiva nel passaggio allo statore determina il tipo di protezione del motore.
Albero del rotore
Il pacco laminato sul lato rotore è applicato a un albero d’acciaio. Le due estremità dell’albero attraversano gli scudi, rispettivamente sul lato A e B. Sul lato A è applicata l’estremità dell’albero di uscita (che nel motoriduttore è configurato come l’estremità del pignone), mentre sul lato B sono montati la ventola con le pale per l’autoventilazione e/o i sistemi complementari, per es. i fremi meccanici e l’encoder, ecc.
Alloggiamento motore
Per potenze medio-basse, l’alloggiamento del motore può essere realizzato in ghisa di alluminio. In caso di potenze superiori tutti gli alloggiamenti vengono costruiti in ghisa grigia. All’alloggiamento è applicata una scatola terminali, in cui le estremità dello statore sono collegate a una morsettiera per il collegamento elettrico da parte dell’utente. Le alette di raffreddamento estendono la superficie dell’alloggiamento, facendo aumentare la dispersione di calore nell’ambiente.
Ventola, copriventola
La ventola montata sul lato B dell’estremità dell’albero è coperta da un copriventola, che convoglia attraverso le scanalature dell’alloggiamento il flusso d’aria prodotto durante la rotazione, indipendentemente dalla direzione di rotazione. Una lamiera di protezione opzionale impedisce che, in caso di montaggio verticale, (piccole) parti cadano nella grata del copriventola.
Cuscinetti
I cuscinetti presenti negli scudi, rispettivamente sul lato A e B, collegano meccanicamente le parti rotanti a quelle fisse. In genere vengono utilizzati cuscinetti scanalati, più di rado cuscinetti a rulli cilindrici. Le dimensioni dei cuscinetti dipendono dalle forze e dalle velocità che i singoli cuscinetti devono assorbire. Sistemi di tenuta di vario tipo garantiscono che nel cuscinetto siano mantenute le proprietà lubrificanti necessarie, impedendo la fuoriuscita di oli e/o grassi.
Principio di funzionamento
Il sistema di avvolgimento simmetrico in tre fasi dello statore è collegato a una rete di corrente trifase con tensione e frequenza idonee. In ciascuno dei tre avvolgimenti di fase scorrono correnti sinusoidali della stessa ampiezza, tra le quali c’è uno scarto temporale di 120°. Poiché tra gli avvolgimenti di fase c’è anche uno scarto spaziale di 120°, lo statore crea un campo magnetico che ruota con la frequenza della tensione applicata.
Questo campo magnetico rotante, definito in breve campo rotante, crea una tensione elettrica negli avvolgimenti o nelle barre del rotore. Poiché la bobina è cortocircuitata dall’anello, si ha un flusso di correnti di corto circuito. Oltre al campo rotante, queste correnti creano delle forze e producono una coppia al di sopra del raggio del rotore, che accelera la velocità del rotore nella direzione del campo rotante. All’aumento della velocità del rotore corrisponde la diminuzione della frequenza della tensione generata nel rotore, poiché questo riduce la differenza tra la velocità del campo rotante e la velocità del rotore.
Le tensioni indotte, che dunque risultano inferiori, provocano correnti meno intense nella gabbia del rotore e, di conseguenza, forze e coppie di minore intensità. Se il rotore raggiungesse la stessa velocità del campo di rotazione, la rotazione sarebbe sincrona e non verrebbe generata alcuna tensione; di conseguenza, il motore non potrebbe applicare alcuna coppia. Tuttavia, la coppia di carico e il momento di attrito nei cuscinetti provocano una differenza tra la velocità del rotore e del campo rotante e, pertanto, un equilibrio tra la coppia di accelerazione e la coppia di carico. Il funzionamento del motore è asincrono.
Questa differenza aumenta o diminuisce in funzione del carico del motore, ma non è mai pari a zero, poiché c’è sempre attrito, anche in caso di funzionamento a vuoto. Se la coppia di carico supera la coppia di accelerazione massima che può essere generata dal motore, il motore “cade” in uno stato operativo inammissibile che potrebbe causare dei danni termici.
Il movimento relativo tra la velocità del campo rotante e la velocità meccanica, necessario a garantire il funzionamento, viene definito scorrimento “s” ed è indicato dal valore percentuale della velocità del campo magnetico. Nei motori a potenza ridotta lo scorrimento può essere compreso tra il 10% e il 15%, mentre nei motori trifase di potenza superiore può variare tra il 2% e il 5% circa.
Prestazioni operative
Il motore trifase a gabbia di scoiattolo prende l’energia dalla rete di alimentazione elettrica e la trasforma in potenza meccanica, ovvero in velocità e coppia. Se il motore funzionasse senza perdite, la potenza meccanica di uscita Pout corrisponderebbe alla potenza elettrica assorbita in entrata Pin.
Tuttavia, anche nei motori trifase si hanno delle perdite, come avviene sempre quando si ha una conversione energetica: a causa dell’accumulo di calore in un conduttore di corrente si hanno perdite nel rame PCu e perdite a livello di barra PZ. Le perdite nel ferro PFe sono causate dal calore generato durante la rimagnetizzazione del pacco laminato con frequenza di rete. Le perdite da attrito PRb sono dovute all’attrito nei cuscinetti mentre le perdite d’aria sono riconducibili all’uso dell’aria di raffreddamento. L’efficienza della macchina è data dal rapporto tra la potenza di uscita e quella assorbita.
Motori elettrici trifase, motori elettrici asincroni trifase e monofase normalizzati per uso generale in applicazioni industriali, con rotore a gabbia in corto circuito, chiuso, autoventilato esternamente (metodo di raffreddamento IC 411), classe termica d’isolamento F (sovratemperatura motore classe B per tutti i motori con potenza normalizzata; classe B o B/F per i rimanenti motori trifasi e monofasi).
Progettati per operare in servizio continuo (S1) a tensione e frequenza nominali. Temperatura aria dell’ambiente di lavoro: –15 ÷ +40°C. Altitudine massima: 1000 m sul livello del mare. Alimentazione a tensione nominale di 400 [V] ±5% e frequenza nominale di 50 [Hz] ±2%. I motori CHT-A, CHT-G e CHT-M non idonei ad ambienti con pericolo di esplosione.
Gamma motori standard
Motori Trifase CHT-A 56…160 – 2 poli
Motori Trifase CHT-A 56…160 – 4 poli
Motori Trifase CHT-A 56…160 – 6 poli
Motori Trifase CHT-A 71…160 – 8 poli
Motori Trifase CHT-G 160…400 – 2 poli
Motori Trifase CHT-G 160…400 – 4 poli
Motori Trifase CHT-G 160…400 – 6 poli
Motori Trifase CHT-G 160…400 – 8 poli
Motori Monofase CHT-M 63…100 – 2 poli
Motori Monofase CHT-M 56…100 – 4 poli
Motori Trifase CHT-A 56…160
Motori Trifase CHT-G 160…400
Motori Monofase CHT-M 56…100
Motori elettrici trifase asincroni IE2 / IE3
Motori elettrici trifase asincroni normalizzati progettati per uso generale in applicazioni industriali, con rotore a gabbia in corto circuito, chiuso, autoventilato esternamente (metodo di raffreddamento IC 411), classe termica d’isolamento F (sovratemperatura motore classe B per tutti i motori con potenza normalizzata; classe B o B/F per i rimanenti motori trifasi e monofasi).
Progettati per operare in servizio continuo (S1) a tensione e frequenza nominali. Temperatura aria dell’ambiente di lavoro: -15 ÷ +40°C. Altitudine massima: 1000 m sul livello del mare. I motori CHT-A, CHT-G non idonei ad ambienti con pericolo di esplosione. I motori IE2 da 7,5 kW dovranno essere alimentati da inverter se utilizzati nello Spazio Economico Europeo.
Gamma motori asincroni trifase IE2 / IE3
- Motori IE2 CHT-A 2 poli
- Motori IE2 CHT-A 4 poli
- Motori IE2 CHT-A 6 poli
- Motori IE2 CHT-G 2 poli
- Motori IE2 CHT-G 4 poli
- Motori IE2 CHT-G 6 poli
- Motori CHT-A trifase
- Motori IE3 CHT-A 2 poli
- Motori IE3 CHT-A 4 poli
- Motori IE3 CHT-A 6 poli
- Motori IE3 CHT-G 2 poli
- Motori IE3 CHT-G 4 poli
- Motori IE3 CHT-G 6 poli
- Motori CHT-G trifase

Motori elettrici trifase asincroni IE4
Motori elettrici trifase asincroni normalizzati progettati per uso generale in applicazioni industriali, con rotore a gabbia in corto circuito, chiuso, autoventilato esternamente (metodo di raffreddamento IC 411), classe termica d’isolamento F (sovratemperatura motore classe B per tutti i motori con potenza normalizzata; classe B o B/F per i rimanenti motori trifasi e monofasi).
Progettati per operare in servizio continuo (S1) a tensione e frequenza nominali. Temperatura aria dell’ambiente di lavoro: -15 ÷ +40°C. Altitudine massima: 1000 m sul livello del mare. I motori CHT-A, CHT-G non idonei ad ambienti con pericolo di esplosione.
Gamma motori asincroni trifase IE4
- Motori IE4 CHT-A 2 poli
- Motori IE4 CHT-A 4 poli
- Motori IE4 CHT-A 6 poli
- Motori IE4 CHT-G 2 poli
- Motori IE4 CHT-G 4 poli
- Motori IE4 CHT-G 6 poli
- Motori CHT-A trifase
- Motori CHT-G trifase
Motori elettrici – esecuzioni speciali
I motori elettrici CHTMOTOR possono essere customizzati in base alle specifiche esigenze di ogni singolo cliente, adattandoli alle condizioni climatiche più estreme ed agli ambienti di lavoro più a rischio.
Il know-how e l’esperienza acquisita ci consentono di intervenire su qualsiasi aspetto del motore, per realizzare delle configurazioni su misura che si adattino con la massima efficienza all’applicazione finale o all’ambiente di lavoro.
Gamma esecuzioni speciali e accessori
- Impregnazione supplementare avvolgimento
- Fori scarico condensa
- Protezione IP56
- Protezione IP67
- Motore senza ventola per ventilatore
- ATEX per atmosfere potenzialmente esplosive
- Cuscinetto isolato elettricamente
- Verniciature speciali
- Copriventola per ambiente tessile
- Cuscinetto a rulli cilindrici
- Sonde termiche bimetalliche
- Sonde termiche a termistori
- Sensore di temperatura PT 100
- Scaldiglia anticondensa
- Tettuccio parapioggia
- Condensatore ausiliario con disgiuntore
- Encoder standard ad albero cavo
- Servoventilatore assiale
- Motore certificato a norma UL e EAC
- Seconda estremità d’albero
- Esecuzione per basse e alte temperature
L’efficienza è sempre più importante
In seguito all’inasprimento delle norme, negli ultimi anni è stata prestata un’attenzione sempre maggiore all’impiego di motori ad alta efficienza energetica. A tale scopo, a livello normativo sono state definite delle classi di efficienza energetica, sulle quali i produttori basano i dati tecnici. Questo ha portato all’adozione dei provvedimenti seguenti nella costruzione dei motori elettrici, con l’intento di ridurre le elevate perdite nella macchina:
un maggior impiego di rame nella bobina del motore (PCu)
una miglior qualità del materiale della lastra (PFe)
l’ottimizzazione della geometria della ventola (PRb)
cuscinetti ottimizzati in termini energetici
Rilevando i valori di coppia e corrente rispetto alla velocità, si ottiene la curva caratteristica velocità/coppia del motore trifase. Il motore segue questa curva tutte le volte che viene acceso, fino a quando non raggiunge il punto di funzionamento stabile. Il numero di poli, la struttura costruttiva e il materiale dell’avvolgimento del rotore influenzano l’andamento delle curve caratteristiche. Conoscere queste curve è particolarmente importante in caso di azionamento con coppia resistente (per es. meccanismi di sollevamento).
Se la coppia resistente della macchina è superiore alla coppia di insellamento, la velocità del rotore di fatto viene “bloccata”. Il motore non raggiunge il suo punto di funzionamento nominale, ovvero il punto di funzionamento stabile termicamente sicuro. Se la coppia resistente supera addirittura la coppia di avviamento, il motore si arresta. In caso di sovraccarico dell’azionamento (per es. di un nastro convogliatore) la velocità diminuisce con l’aumentare del carico. Se invece la coppia resistente supera la coppia di rovesciamento, il motore “si ribalta” e la velocità scende al valore di insellamento o addirittura a zero. Tutti gli scenari prevedono correnti molto elevate nel rotore e nello statore che, pertanto, si riscaldano molto rapidamente. La mancanza di dispositivi di protezione adeguati potrebbe comportare guasti termici del motore che, in pratica, “brucia”.
Le classi termiche
Il calore che si forma in un conduttore di corrente dipende dalla resistenza del conduttore e dall’intensità della corrente da cui è attraversato. L’accensione e l’azionamento frequenti con coppia resistente provocano un notevole carico termico sul motore trifase. Il riscaldamento ammesso del motore dipende dalla temperatura del refrigerante che lo circonda (per es. l’aria) e dalla resistenza termica del materiale isolante dell’avvolgimento.
I motori sono suddivisi in classi termiche (in precedenza definite anche “classi di isolamento”) che stabiliscono le sovratemperature massime ammesse dei motori (IEC 60034). Il motore deve essere in grado di funzionare a temperature elevate, in base alla potenza nominale della classe termica a cui appartiene, senza subire danni. Con una temperatura del refrigerante massima di 40 °C, per esempio, la sovratemperatura massima ammessa nella classe termica 180(H)³= 125 °C.
Cosa sono i motori elettrici trifase variatori di poli?
Grazie alla variazione del numero di poli, questi tipi di motori possono essere azionati con velocità diverse. Grazie all’inserimento di diverse bobine nelle scanalature dello statore o all’inversione della direzione del flusso di corrente nelle singole parti delle bobine, si ottengono diversi numeri di poli. In caso di bobine separate, la potenza di ciascun numero di poli è inferiore alla metà della potenza di un motore a una velocità delle stesse dimensioni.
I motoriduttori trifase variatori di poli vengono utilizzati come unità di propulsione. In caso di funzionamento con un basso numero di poli, la velocità di marcia è elevata. Per il posizionamento occorre passare alla bobina multipolare a bassa velocità. Durante la commutazione, a causa dell’inerzia, inizialmente il motore mantiene la velocità elevata. In questa fase il motore trifase funziona come un generatore e frena. L’energia cinetica viene trasformata in energia elettrica e nuovamente alimentata nella rete elettrica. L’elevato passo della coppia risulta svantaggioso durante la commutazione che, tuttavia, può essere ridotta grazie a misure di collegamento idonee.
I miglioramenti conseguiti nella tecnica di conversione a basso prezzo favoriscono l’impiego di motori variatori di poli a velocità singola e frequenza controllata per molteplici applicazioni.